

凹版印刷機干燥運動控制卡控制伺服系統調試
文章出處:正航儀器
人氣:
發表時間(jian):2014-09-30
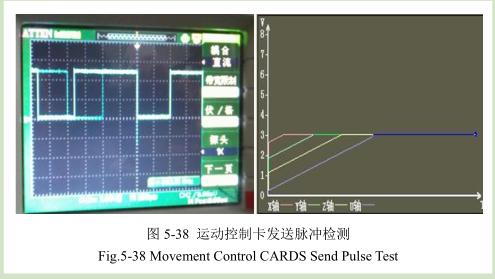
一、控制卡發送脈沖檢測
為了確保在調試和后續檢測運行過程中控制脈沖信號的正常性,調試前對USB1020運動控制卡的功能是否正常進行了檢測。檢測過程中通過示波器檢測各軸發送脈沖的波形特性,同時配合演示系統檢測各軸同步發送脈沖的情況。通過測試驗證,USB1020運動控制卡各脈沖發送通道發送脈沖正常。
二、驅動電機調試中遇到問題及解決辦法
(1)控制卡驅動電機中遇到問題:
運動控制卡各通道發送脈沖情況驗證正常后,在前期硬件布線的基礎上,以X軸脈沖發送通道為例把運動控制卡進行了接線。在驅動伺服系統進行調試的過程中,用示波器觀測X軸脈沖發送通道正常但是不能驅動伺服系統運轉,觀察伺服系統顯示面板伺服系統也沒有接收到控制脈沖。
(2)問題分析及解決辦法:
1)考慮到可能是控制系統接線或者伺服系統參數設置的問題,為了排除這種可能性,把控制卡脈沖發送端口斷開,在系統中接入脈沖編碼器,通過轉動編碼器的形式來給伺服系統發送控制脈沖。電路接通后,當轉動編碼器的軸時,伺服電機帶動絲桿滑臺產生相應的移動。因此可知伺服系統接線及參數設置正常。

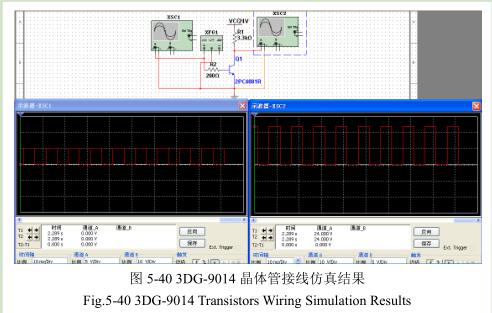
2)經過深入分析后發現運動控制卡發送脈沖信號的電壓在空載時為5V左右,接入電路后脈沖信號電壓降到3V左右,而一般伺服系統的驅動信號為24V,可能是脈沖信號驅動能力不足的原因。為了驗證和解決這種情況,在控制卡信號發出端和伺服脈沖輸入端接入一個3DG-9014晶體管,脈沖信號經200Ω電阻后接入晶體管基極,晶體管發射極接24V地,24V直流電源正極與晶體管集電極間接入一3KΩ的電阻,同時晶體管集電極接PP或者NP。通過9014晶體管電路接線模擬仿真,輸出脈沖信號可以達到24V,此種接線方法可以解決驅動能力不足的問題。圖5-40是3DG-9014晶體管接線仿真結果。
接線完畢后,伺服驅動參數設置不變,運動控制卡發送脈沖給伺服系統,此時伺服電機運轉正常。為了在調試過程中使得伺服電機可以正反轉,可以用兩個3DG-9014晶體管分別接在控制卡正反脈沖輸出端,之后再按照上面的接線方法接入伺服系統的PP或者NP端,以實現電機的正反轉控制。
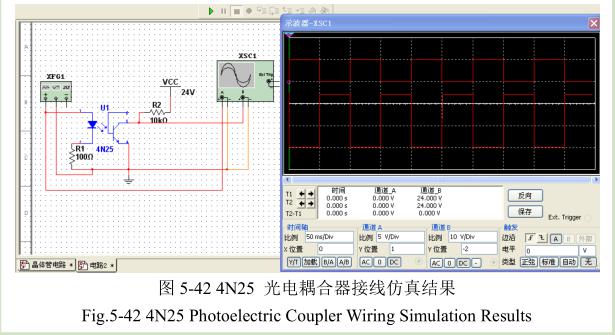
由于與晶體管相比,光電耦合器具有更好的抗干擾能力,測試過程中為了能夠限度的減少外界干擾因素對系統定位精度的影響,平臺調試中擬采用光電耦合器來代替晶體管,同時采用和晶體管同樣原理的接線來操作。根據實驗室現有的資源,調試中可采用4N25系列的光電耦合器來代替晶體管。通過4N25光電耦合器電路接線模擬仿真,輸出脈沖信號可以達到24V,此種方法也可以達到預期的目的。圖5-42是4N25光電耦合器接線真結果。
三、調試平臺定位精度校正
(1)調試過程中傳動部件由于受到機械加工、安裝等一些因素的影響,會對定位精度產生一定的影響。本項目調試過程中為了盡量減小這些不確定因素引起的定位誤差,首先要測得不同脈沖數量下對應的誤差,并對對這些誤差進行分析,然后通過調整發送脈沖的數量的方法來進行定位補償。
(2)調試過程中,傳動絲桿的導程為5mm,通過聯軸器直接和伺服電機相連接,伺服參數設置按照之前的電氣接口設計進行。調試過程中通過百分表對定量脈沖的定位距離進行測量,然后把測得數值和理論值計算值進行比較,進而分析得出系統的傳動精度。
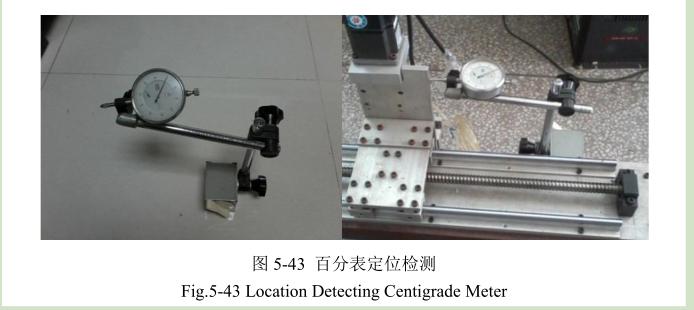
(3)經過多次測量,發現100個脈沖的定位精度誤差在百分表上顯示為0.6格左右,1000個脈沖的定位精度誤差為6格左右,即和理論值相比1000個脈沖定位超出0.06mm。因此通過每1000個脈沖減少6個脈沖發送來對定位精度進行調整。經過多次測量,經過沖參數調整后2.5mm行程定位誤差在0.001mm左右,推算下去250mm的定位誤差小于0.1mm,滿足設計定位要求。由于受實驗沒有長量程的定位測量儀器的條件限制,沒有對長距離定位精度進一步測量,在實際檢測過程中可根據現場需要進一步對相應參數進行調整。//ynje.cn
下一篇: 凹版印刷機干燥調試平臺電氣部分設計與搭建內容
上一篇: 凹版印刷機干燥程序調試版塊介紹
此文(wen)關(guan)鍵詞:
同類文章排行
- 鹽霧試驗箱操作全流程
- 快碼住!!精英版恒溫恒濕箱操作保養維護手
- 鹽霧試驗箱校準規范
- 鹽霧試驗箱不噴霧的原因及解決方法
- 砂塵試驗箱可不是小透明!
- 鹽霧試驗箱的使用和維護方法
- 論恒溫箱去濕如何操作
- 高低溫沖擊箱測試的標準
- 恒溫恒濕箱核心配件與優勢部分總結!!
- 可程式恒溫箱二三事
最新資訊文章
- 鹽霧試驗箱的用途和鹽霧試驗的區別是什么
- 鹽霧老化試驗箱與恒溫恒濕試驗箱順利發貨,
- 鹽霧老化試驗箱、恒溫恒濕試驗箱與IPX5
- 鹽霧老化試驗箱與恒溫恒濕試驗箱出口德國客
- 鹽霧老化試驗箱如何測試?
- 鹽霧老化試驗箱和非標恒溫恒濕試驗箱發貨江
- 恒溫恒溫試驗箱,冷熱沖擊試驗箱,鹽霧老化
- 鹽霧老化試驗箱主要應用在哪些領域?
- 非標恒溫恒濕試驗箱和鹽霧試驗箱發貨江蘇。
- 1000L恒溫恒濕箱與120鹽霧腐蝕試驗
- 鹽霧老化試驗箱可以做哪些試驗?
- 2臺恒溫恒濕試驗箱,1臺鹽霧老化試驗箱,
- 鹽霧腐蝕老化試驗箱簡介
- 1400L快速溫變箱線性5℃/min,
- 鹽霧試驗箱牌子選哪個?
- HAST高壓老化試驗箱操作步驟
- PCT高壓老化試驗與HAST高壓老化試驗
- 鹽霧試驗箱出現誤差的原因分析
- hast試驗箱工作原理
- 正航分享鹽霧試驗箱不噴霧的原因及解決方法
聯系我們

咨詢熱線:
400-822-8565
